


MC5 és MC3 csillagászati távcsővezérlő rendszer
Ez a berendezés komfortossá és kényelmessé teszi a csillagászati távcső használatát. Szolgáltatásai az igényes amatőr minden igényét kielégítik. Kiegészítőkkel a berendezés alkalmas professzionális, obszervatóriumi alkalmazásra is.
Az MC3 és MC5 rokon termékek: Az MC5 az MC3 utódja, ami sok új funkcióval rendelkezik, amelyek közül az egyik leglényegesebb az abszolút enkóderek támogatása. Ez a leírás mindkét vezérlőre vonatkozik. A különbségek az adott helyeken ki vannak emelve.
Tartalom
Bevezetés
Figyelem: Ha egy régebbi MC3 vagy MC4 modellről keres információt, vagy a hozzá tartozó régebbi MCConfig program érdekli, lépjen a következő oldalra.
A következő képeken az MC3 vezérlőegység látható:




Az MC3-hoz kézi távirányító is rendelhető: Erről ezen az oldalon olvashat.


Ez az eszköz alkalmas közepes és nagy távcsőmechanikák vezérlésére, goto (automatikus pozícionálás kiválasztott égi objektumra) auto-guiding (követés, vezetés) feladatokra. A berendezés többféle távcsőmechanikával kompatibilis, amennyiben az kétfázisú léptetőmotorokat tartalmaz.
Támogatott mechanikák
Az MC3 többféle távcsőmechanikához illeszthető. A mechanika illeszthetősége két dologtól függ: A használt motorok típusától és az áttételtől. Az MC3 szabadon állítható áttétellel képes dolgozni. Az MC3-at számítógéppel összekapcsolva, egy segédprogrammal megadhatja az ön mechanikájának áttételét.
A következő mechanikákkal garantált (tesztelve) az MC3 együttműködése:
- Fornax 51, 100, 150 mechanikák
- Sári Pál által fejlesztett és gyártott, magyar gyártmányú mechanikák. Robusztus, masszív, nagy teherbírású, pontos berendezés. Az MC3 kompatibilis a Fornax 51, 100, 150 család összes tagjával. Az MC3 vezérlést vásárolhatja a mechanikával együtt is, ebben az esetben a komplett konfigurációs, beállítási munkák elvégzését is kérheti tőlünk hogy azonnal egy kulcsrakész rendszert kapjon.
- Stabi mechanikák
- Vizi Péter és Tóth János által fejlesztett, magyar gyártányú mechanika. A Fornax típusoktól valamivel kisebb, hordozható, rendkívül pontos és masszív szerkezet. Az MC3 vezérlést vásárolhatja a mechanikával együtt is, ebben az esetben a komplett konfigurációs, beállítási munkák elvégzését is kérheti tőlünk hogy azonnal egy kulcsrakész rendszert kapjon.
- Gemini G42
- A Gemini mechanikák standard tartozéka a Pulsar vezérlés. Az MC3 egy költséghatékony alternatíva. A G42 mechanika támogatása teljeskörű, Az F53 mechanika rendelkezik enkóderekkel is, ezek használata nem támogatott az MC3 által.
- Skywatcher EQ6, EQ8 és további Synta modellek
- Ezek a mechanikák beépített elektronikát és gyors léptetőmotorokat tartalmaznak. Ha az eredeti elektronikát eltávolítja és kivezeti a motorok kábelét, a mechanika alkalmassá válik az MC3-mal való használatra. Ebben az esetben komfortosabb, könnyebben kezelhető vezérlést kap, több probléma megoldódik: Az Ursa Minor kézivezérlő rendelkezik gombelemmel táplált órával amely kikapcsolt állapotban is jár, kijelzője jól olvasható, a referencia csillag kiválasztását grafikus ábrával segíti. Az MC3 fejlett műszaki megoldásainak köszönhetően az eredeti motorok is simábban, egyenletesebben járnak és nagyobb sebesség elérésére is mód van.
Használat kézivezérlővel vagy számítógéppel
Az MC3 mellé önnek még szüksége van egy kézivezérlőre vagy egy számítógépre (megfelelő szoftverrel). A következő listában összefoglaltuk a lehetőségeket:
- Ursa Minor kézivezérlő
- Kis méretű, felhasználóbarát, kézben tartható kézivezérlő, kifejezetten az MC3 vezérlőkhöz fejlesztve. Erről az eszközről a külön oldalon olvashat.
- Számítógép kapcsolat az Ursa Minor Pro programmal
- Az Ursa Minor Pro program közvetlenül támogatja az MC3-at és az Ursa Minor kézivezérlőt, ASCOM driverre nincs szükség. A kevesebb szoftveregység és kiegészítő kényelmesebb használatot és könnyebb beállítást tesz lehetővé és kevesebb hibalehetőséget tartalmaz. Az Ursa Minor Pro program az alapfunkciókon kívül további szolgáltatásokat is nyújt: DSLR fényképezőgép vezérlése, sorozatkép készítése.
- Számítógép kapcsolat más programokkal
- Az MC5 és MC3 vezérlőkhöz ASCOM driver is elérhető a letöltések oldalról. Minden program, ami támogatja az ASCOM szabványt, képes az MC5, MC3 vezérlésére.
Műszaki paraméterek
Elektromos paraméterek és szolgáltatások
| MC3 | |
|---|---|
| Tápfeszültség | 12V - 30V (24V - 30V stabilizált tápegység ajánott) |
| Max. áramfelvétel | 2,5A |
| Max. motoráram | 1,8A (impulzus csúcsáram) |
| Kézivezérlő | Ursa Minor kézivezérlő |
| USB port | FTDI USB-soros interfész beépítve |
| Autoguider port | RJ-11 (6 pólusú telefon aljzat) ST4 kompatibilis |
| DSLR kimenet | 2,5mm átmérőjű sztereó jack aljzat optocsatolóval leválasztva. |
Tápellátás: Ajánlott a készüléket stabilizált labortápegységről táplálni. Ebben az esetben a legjobb eredményt 30V tápfeszültségnél éri el. Ha a tápegység nem stabilizált, 24V névleges feszültségűt válasszunk. (Azért mert a nem stabilizált tápegységek kimenő feszültsége a névlegestől több is lehet.)
Előlapi csatlakozók
Az előlapon található egy kézivezérlő bemenet, USB csatlakozó, autoguider bemenet, és DSLR távkioldó kimenet. A bluetooth szimbólummal jelzett csatlakozóra Bluetooth interfészt vagy más, a későbbiekben kifejlesztésre kerülő kiegészítőt csatlakoztathat. Az MC3 képes működni kézivezérlőről és számítógépről irányítva is. Ne használja úgy hogy egyidejűleg kézivezérlővel és számítógéppel is össze van kapcsolva. Vagy csak kézivezérlőről, vagy csak számítógépről vezérelje. A két helyről érkező, egymásnak ellentmondó parancsok hatására az MC3 szabálytalanul is működhet. Pl. ha a számítógépről goto parancsot kap, eközben a kézivezérlővel manuálisan mozgatni szeretné a távcsövet.
MC3 előlapi csatlakozók kiosztása balról jobbra: Autoguider, Ursa Minor kézivezérlő, Synta kézivezérlő, USB, Fényképezőgép távkioldó.
Hátlapi csatlakozók
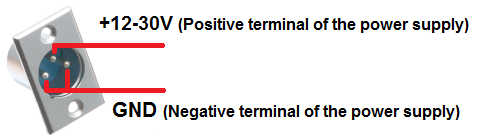
A hátlapon található a Tápfeszültség bemenet, a tápkapcsoló és kimenet két motor számára.

Tápfeszültség csatlakozó bekötése:
Motor csatlakozó bekötése: A csatlakozó érintkezői kettessével össze vannak forrasztva az 1,8A csúcsáram biztonságosabb átvitele érdekében:
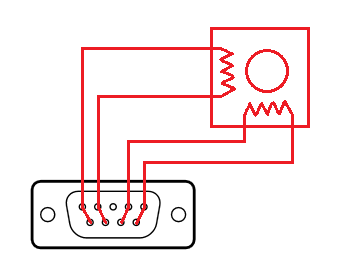
A Fornax mechanikák négypólusú, kerek motorcsatlakozóval rendelkeznek. A következő ábrán látható módon csatlakoztathatjuk az MC3-hoz: (Motoronként egy-egy kábel kell.)

A következő ábrán a Gemini G42 mechanikához való átalakító kábel kialakítása látható. A G42 mechanikán egyetlen 15 pólusú csatlakozóra vannak kivezetve mindkét motor kábelei.


Fontos tudnivaló: A mechanika kelet-nyugati állapota
Egy fontos tudnivalót tisztázni kell mielőtt használni szeretné az MC3 vezérlőt. A német ekvatoriális távcsőmechanikák (Az elterjedt amatőrcsillagász távcsőmechanikák tulnyomó többsége ilyen.) jellegzetessége hogy a távcsővel akadálytalanul nem tudjuk végigpásztázni az égboltot a keleti horizonttól a nyugati horizontig. Félúton (a zenit környékén) a távcső beleütközne az állványba. Ekkor a távcsövet át kell fordítanunk az állvány másik oldalára.
Ennek megfelelően megkülönböztetünk nyugati és keleti térfelet annak megfelelően hogy a távcső az oszlop melyik oldalán van:
- Nyugati oldal: A távcső az oszlop nyugati oldalán van, ilyenkor a keleti horizonttól a zenitig tudunk észlelni.
- Keleti oldal: A távcső az oszlop keleti oldalán van, ilyenkor a nyugati horizonttól a zenitig tudunk észlelni.
- Az égbolt Zenithez közeli részét meg tudjuk figyelni úgy hogy a távcső az oszlop akár keleti akár nyugati oldalán van.
A két térfél vezérlés szempontjából nem egyenértékű. A távcsővezérlőnek tudnia kell róla, hogy a távcső keleti vagy nyugati oldalon van. Ha a távcső nem olyan pozícióban van, ahogyan azt a vezérlő tudja, abból komoly probléma is lehet.
Az MC5 vezérlő képes abszolút enkódereket kezelni. Ha a mechanika fel van szerelve enkóderekkel és azok be is vannak kalibrálva, az MC5 így pontosan tudja, hogy a mechanika ténylegesen milyen pozícióban van.
Az MC3 vezérlő nem kezel abszolút enkódereket, tehát nem tudja hogy a mechanika ténylegesen milyen pozícióban van, csak feltételezi azt. Ezért fontos, hogy kikapcsolás előtt parkoltassuk le a távcsövet, hogy a következő bekapcsoláskor az a már ismert park pozícióból induljon.
Fontos tudnivaló: A távcső park pozíciója
Célszerű kitüntetni a távcsőnek egy pozícióját, amilyen helyzetben tartjuk kikapcsolt állapotban. Ezt nevezzük park pozíciónak. Ez a pozíció tetszőleges lehet. A park pozíció beállításával és következetes használatával egyszerre két problémára kapunk megoldást:
- Nyugalmi állapot, a tető zárhatósága
- Ha a távcsövet eltolható tetejű épületben használjuk, előfordul hogy a tető kialakítása olyan, hogy az nem csukható be a távcső tetszőleges pozíciójában. Ekkor azt a helyzetet nevezzük ki park pozíciónak, amikor a tető becsukható. Észlelés befejeztével a távcsövet park pozícióba küldjük, majd kikapcsoljuk a rendszert.
- Távcső indítása ismert pozícióból
- Az inkrementális rendszernek nincs tudomása arról, hogy a távcső ténylegesen milyen pozícióban van. A bekapcsolás pillanatában csupán feltételezésből indulhat ki: A rendszer feltételezi hogy a távcső a park pozícióban van és ehhez képest számol. Ezzel megúszhatjuk a használat előtti, egyébként kötelező, referenciapont és kelet/nyugat oldal választást. MC5 használatával, abszolút enkóderekkel ez a probléma nem áll fenn.
Láthatjuk, mennyire fontos hogy a vezérlő által feltételezett és a tényleges pozíció ne térjen el egymástól. Ha a távcső ténylegesen nem ebben a pozícióban van, az komoly problémákat okozhat, ami legenyhébb esetben csupán téves pozícionálást eredményez, súlyos esetben anyagi kár is keletkezhet (Távcső ütközése az állványhoz, tető ütközése a távcsőhöz)
Az MC5 vezérlő képes abszolút enkódereket kezelni. Ha a mechanika fel van szerelve enkóderekkel és azok be is vannak kalibrálva, az MC5 így pontosan tudja, hogy a mechanika ténylegesen milyen pozícióban van. Ha ön MC5 vezérlést használ, egyszer be kell kalibrálnia az enkódereket, és utána a rendszert a mechanika bármilyen pozíciójában indíthatja, még arra sem kell ügyelnie, hogy mindig pontosan parkoltassa a távcsövet az előző használat végén.
Ha ön MC3 vezérlést használ (Mivel az nem kezel abszolút enkódereket), a következőket kell figyelembe vennie:
Alapvető fontosságú, hogy semmit se tegyünk a vezérlő tudta nélkül, és gondoskodjunk róla hogy a vezérlő által tudott és a tényleges pozíció ne térjen el egymástól. A következő szempontokat tartsuk be a helyes működés érdekében:
- Ne mozgassuk a távcsövet kézzel, kikapcsolt állapotban!
- Kerüljünk minden olyan szituációt, ami miatt a mechanika kuplungja megcsúszna.
- Kerüljünk minden olyan szituációt, ami vészleállítást igényelne: Pl. pozicionálás megszakítása tubus ütközésveszély vagy beakadó kábel miatt.
- Ne kapcsoljuk ki a vezérlést váratlanul, ilyenkor esélye sincs arra hogy elmentse a park pozíciót.
- A munka befejeztével ne bontsuk a kapcsolatot a vezérlővel anélkül, hogy parkoltatnánk a távcsövet! A következő kapcsolódáskor a rendszer a távcső aktuális pozícióját tekinti park pozíciónak, ami ilyenkor eltér a megkívánttól.
- A referenciacsillagra való korrigálást körültekintően végezzük: Ha a távcső által megcélzott és a képernyőn kiválasztott csillag nem azonos, a rendszer máris elvesztette a szinkront a tényleges és az elméleti pozíció között. A hiba mértéke megegyezik a tényleges és a kiválaszott csillag közötti távolsággal. Ez azt eredményezi hogy park pozícóba küldéskor is ugyanennyivel el fog térni a kívánt pozíciótól (Akár azt is eredményezheti hogy a tető már nem lesz csukható.)
A fenti hibák bekövetkezte után a park pozíciót újra definiálnunk kell.
A probléma megbízható megoldására abszolút enkóderekre és az ezt támogató vezérlésre van szükség, ezt nyújtja az MC5.
Az abszolút enkóder (abszolút szögadó) egy olyan eszköz, amely bármely időpillanatban képes a tengelyének szögállását az enkóder házához képest megadni. A pozícióérték közvetlenül bekapcsolás után is rendelkezésünkre áll: Az enkóder kikapcsolt (árammentes) állapotában is tetszőlegesen elforgathatjuk a tengelyét, bekapcsolás után, ebben az esetben is valós pozícióadat (elfordulás-érték, szög-érték) áll rendelkezésünkre.
Ezzel szemben az inkrementális szögadó csak arra alkalmas, hogy a bekapcsolt állapotban, impulzusok számlálásával kövessük egy tengely elfordulását. A hiányossága is ebben rejlik: Ha bármilyen okból megszakad az impulzusok számlálása, (Meggondolatlan kikapcsolás parkoltatás nélkül, vészleállítás vagy szoftverhiba.) a rendszer többé nem képes valódi pozícióadatot szolgáltatni.
Tennivalók használatbavétel előtt
Összeszerelés, csatlakoztatás
A kábeleket csak a készülék kikapcsolt állapotában csatlakoztassa!
- Csatlakoztassa a mechanika motorkábeleit a hátlapon levő két D9-es csatlakozóba.
- Csatlakoztassa a tápegységet az MC3 táp bemenetére de még ne kapcsolja be a készüléket.
- Csatlakoztassa vagy a kézivezérlőt, vagy a számítógépet (de egyszerre csak az egyiket.) A kezdeti beállításokhoz a számítógpre szüksége lesz.
Kapcsolat a számítógéppel USB porton keresztül
- Töltse le és telepítse az FTDI USB-soros drivert.
- Csatlakoztassa az MC3-at a számítógéphez USB kábellel, ha még nem tette meg.
- Kapcsolja be az MC3-at.
- Derítse ki, milyen COM port számot kapott az eszköz.
- Indítsa el az mcconfig programot a kezdeti beállítások elvégzéséhez.
Kezdeti beállítások
Mielőtt használatba venné az MC3-at, van néhány beállítás, amit mindenképpen el kell végezni:
- A motorok forgásirányának ellenőrzése (és megfordítása, ha szükséges)
- Maximális sebességek és áramerősségek beállítása
Ezeket a beállításokat elvégezheti számítógépen keresztül az MCConfig programmal, vagy az Ursa Minor kézivezérlő "Mount setup" menüjében.
Kezdeti beállítás számítógépről az MCConfig programmal
Az MC3 készülék alaphelyzetben a Fornax mechanikákhoz előkonfigurálva kerül forgalomba. (Kivétel: Ha ön más típusú mechanikával együtt vásárolja és a beállítások elvégzését is kéri tőlünk.)
Ha ön Fornax mechanikával rendelkezik, akkor is szükség lehet a kezdeti beállítások ellenőrzésére, módosítása, például a távcső kiegyensúlyozatlansága miatt a motor végsebesség csökkentésére.
A mechanika beállítására az MCConfig program szolgál. A programból elérhetőek a régebbi változatok is, de azt javaslom, hogy a legújabb verziót használja, és az MC3-at is frissítse a legújabb firmware verzióra!
Az MCConfig program jelenlegi legfrissebb verziója: 2.6. Letölthető innen: letölthető programok oldala
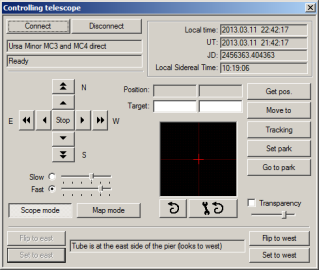
A program telepítést nem igényel. Csak bontsa ki a zip file-t és rögtön használhatja. A program felhasználói felülete a következőképpen néz ki:

A kezdeti beállítási folyamat lépései
Ezt a folyamatot csak egyszer kell elvégeznie, a rendszer használatba vétele előtt.
-
Fontos előfeltétel: Az MCConfig programmal való beállításhoz a távcsövet fordítsa keleti állásba. Arról hogy ez miért fontos, a Fontos tudnivaló: A
mechanika kelet-nyugati állapota fejezetben olvashat.
Az MCConfig program indulás után a fentebb említett keleti oldalt tekinti érvényesnek. Ha valamilyen oknál fogva ez önnek nem felel meg (Például a tereptárgyak miatt korlátozott rálátása van az égboltra) a progtamban (kapcsolódás után!) a "Pier Side" részben állítsa át: A program ablakának bal alsó sarkához közel "East" és "West" nyomógombok egy "Pier side" feliratú kerettel körbevéve.
Az ajánlott kezdőállapot a képen bemutatott keleti pozíció: Az ellensúly tengelye vízszintes legyen és nyugatra nézzen. A távcső az állvány keleti oldalán legyen, objektívje az égi egyenlítő felé nézzen.

Ez a kezdőállapot több szempontból is ésszerű:
- Referenciacsillagot célszerű az egyenlítő közelében keresni.
- A fotózáskor a célpontunk célszerűen a zenit közelében van, és most a távcső is közel van a zenithez.
- Ebből az állapotból nyugodtan kezdhetünk hosszabb fotózást. A követés során a távcső egyre nyugatabbra fordul, az okulár egyre távolodik az állványtól, átfordításra nem lesz szükségünk.
- Csatlakoztassa az MC3-at a számítógéphez, ha még nem tette meg. (USB kábellel)
- Kapcsolja be az MC3-at és indítsa el az mcconfig programot.
- Az ablak bal felső sarkában levő legördülő listából válassza ki a COM port számot, amit az FTDI driver telepítése után derített ki.
- Nyomja meg a Connect gombot és várja meg amíg a kapcsolat létrejön. A connect gomb alatti szövegmezőben megjelenik a "Connected" üzenet.
- A kapcsolat létrejötte után a program kiolvassa a beállításokat az MC3-ból és ennek megfelelően alapállapotba hozza az ablakban levő összes kezelőszervet.
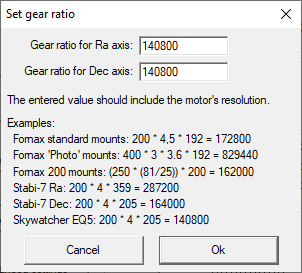
- Következő lépés az áttétel ellenőrzése és szükség esetén a beállítása. A "Gear ratio" részben megjelenik a rekta és
a dekli áttétel értéke. Ez az érték a motor lépésszámával megszorozva értendő. Pédák:
- Fornax mechaninkák standard áttétele: 192(csigakerék) * 4,5(bordásszíj hajtás) * 200(motor lépésszám) = 172800
- Fornax "Photo" sorozatú mechanikák áttétele: 192(csigakerék) * 3,6(bordásszíj hajtás) * 3(bolygómű a motoron) * 400(motor lépésszám) = 829440
- Az ablak bal felső részén levő négy iránygombbal kipróbálhatja, mozognak-e a motorok. A nyíl gomb megnyomására a mozgás elindul az adott irányban. Megállítani a gombok között levő stop gomb megnyomásával lehet. Amíg a stop gombot meg nem nyomja, a motorok folyamatosan mozognak!
- Az iránygombok alatt van egy csúszka, amivel a mozgás sebességét állíthatja. Az iránygombok megnyomásakor olyan sebességgel indulnak a motorok, ahogy ez a csúszka áll. A csúszka bal szélső állása a legalacsonyabb sebességet jelenti. Ez annyira lassú, hogy szabad szemmel már nem érzékeljük. A motorok forgásirányának ellenőrzése előtt állítson be közepes sebességet.
- Ellenőrizze, jól van-e bekötve a rekta motor, a követés valóban nyugati irányban történik. Ehhez először állítsa meg a motorokat (ha eddig nem tette meg), majd nyomja meg a Track on gombot. A követés elindul.
- Figyelje meg, hogy jó irányban történik-e a követés, a távcső látómezejében marad-e a beállított objektum.
- Ha a motor ellenkező irányban forog mint ahogy kellene, a Rekta motorhoz tartozó panelen a Reverse rotation jelölőnégyzetet (checkbox) pipálja be.
- Hasonlóképpen járjon el, ha a deklinációs motor is fordítva lenne bekötve. Itt különösen ügyeljen arra hogy a távcső az állvány megfelelő oldalán legyen. A két oldalon a deklinációs motor forgásiránya éppen ellenkező. A távcsövet fordítsa keleti oldalra (Az ellensúly nyugat felé mutasson) és ezután nyomja meg a program ablakának bal alsó részén a "pier side" kerettel körülvett részben az "East" gombot! Ezután ellenőrizze a deklinációs motor forgásirányát: Az iránygombok közül a felfelé gomb északi mozgásnak felejen meg. Ha a motor az ellenkező irányba forogna, a "Reverse rotation" check box bepipálásával megfordítatja.
- Ha a forgásirányok rendben vannak, a motorok megengedett maximális sebességét állítsa be. A léptetőmotorok sajátossága, hogy minél nagyobb a fordulatszám, annál alacsonyabb a motor által leadott nyomaték. Ezt úgy tapasztalhatjuk meg hogy bizonyos sebesség fölött a motor nem tudja mozgatni a távcsőmechanikát, megáll és kiesik szinkronból. Ilyenkor erősebb zajt is hallunk. Ha ezt tapasztaljuk, csökkentsük a max. sebességet arra a mértékre, amíg a hiba biztosan meg nem szűnik. A motor megengedett maximális sebességét úgy állítsuk be hogy ez a szinkronkiesés jelenség biztosan ne következhessen be.
-
Megjegyzés: Ha a motor kiesik szinkronból, többnyire nem fog magától újraindulni még a sebesség csökkentésére sem. Ilyenkor teljesen állítsuk meg a mozgást (Stop gomb az mcconfig programban) csökkentsük a maximális sebességet (csúszka a program képernyőjén) és indítsuk el újra a mozgást a nyíl gombokkal. A próbálkozást addig ismételjük, a sebességet lépésről lépésre csökkentve, amíg a hibajelenség teljesen meg nem szűnik.
- Határozza meg a park pozíció helyét, azt a pozíciót, amilyen helyzetben legyen a távcső kikapcsolt állapotban:
- Mozgassa a távcsövet a kívánt állásba!
- Fontos: (A felhasználók legtöbbször ezt a lépést szokták kifelejteni, és ebből adódnak később problémák.) Annak megfelelően, hogy az állvány keleti vagy nyugati oldalán van a távcső, nyomja meg a pier side részben az "East" vagy "West" gombokat.
- Nyomja meg a "Define as park" gombot!
- Ha elvégezte a szükséges beállításokat, egyetlen fontos teendője maradt: El kell tárolni a beállításokat az MC3 memóriájában. Ehhez nyomja meg a Write to EEPROM gombot. Ezután az MC3 a következő bekapcsoláskor már az új beállításokkal fog dolgozni.
- Ha minden beállítanivalóval végzett, bontsa a kapcsolatot (Disconnect gomb) és kapcsolja ki az MC3-at.

Kiegészítés a park pozíció definiálásához
A park pozíciót elegendő egyszer, az első használatbavétel előtt beállítanunk. Erre az MCConfig program kényelmes lehetőséget nyújt. Ezután a park pozícióhoz tartozó koordináta értékeket eltároljuk az MC3 memóriájában a többi beállítással együtt.
Az adatok az MC3-ban kerülnek letárolásra, ezért egyaránt elérhetőek az Ursa Minor Pro program és az Ursa Minor kézivezérlő számára. Ez lehetővé teszi hogy a rendszert akár a programmal, akár a kézivezérlővel használjuk, tetszés szerint felváltva.
Az Ursa Minor Pro program és az Ursa Minor kézivezérlő indításkor a park pozíciót tekinti alaphelyzetnek. Ha ez nem volt korábban megadva, vagy az MC3-ban régi firmware van, a bevezetőben említett default keleti pozíciót tekinti park pozíciónak.
A távcső használata végén, mielőtt kikapcsolja a rendszert, ne felejtse park pozícióba küldeni a távcsövet! Ez szükséges ahoz, hogy a következő bekapcsoláskor innen tudja indítani a vezérlő
Ha ezt elmulasztaná a kikapcsolás után, a következő alkalomkor újra be kell állítani a park pozciót az mcconfog programmal.
Kezdeti beállítás Ursa Minor kézivezérlővel
Az Ursa Minor kézivezérlő segítségével is elvégezheti a kezdeti beállításokat. Ebben az esetben nem lesz szüksége számítógép használatára a teljes folyamat semelyik részén sem. Fontos információ: Ha az Ursa Minor kézivezérlővel végzi az MC3 beállítását, ügyeljen rá, hogy eközben semmilyen más eszköz ne legyen az MC3-hoz csatlakoztatva: Ne legyen csatlakoztatva másik kézivezérlő, sem Bluetooth illesztő. Az USB csatlakozót és az autoguider csatlakozót is hagyja üresen!
A beállítás lépései a következők:
- Csatlakoztassa a kézivezérlőt az MC3-hoz, és kapcsolja be az MC3-at.
- Várja meg amíg a kijelzőn megjelenik a "Connected to motor control" felirat. Ezután nyomja meg röviden a menü gombot, hogy a home képernyőre jusson.
- Lépjen be a menübe a menü gomb hosszú (legalább 2 másodperces) megnyomásával. A gombot forgatva, vagy a le-föl gombokat használva navigáljon a "Meridian flip" menüponthoz, majd lépjen be a menü gomb rövid megnyomásával.
- A kijelzőn olvashatja, hogy a kézivezérlő szerint a távcső keleti vagy nyugati állásban van-e. Ennek meg kell egyeznie a mechanika tényleges állapotával. Ha nem így lenne, válassza megfelelően a "Set to east" vagy a "Set to west" opciókat. Megoldás lehet az is, hogy a mechanikát kézzel átfordítja a kívánt állásba. A lényeg hogy a mechanika állapota és a kijelzőn levő szöveg egyezzen meg.
- Lépjen ki a menüből a menü gomb hosszú megnyomásával.
- Ellenőrizze a motorok forgásirányát: A jobbra gomb a RA tengelyt nyugati irányban, a fel gomb a DE tengelyt észak felé kell hogy mozgassa. (Az északi féltekén!)
- Ha valamelyik motor forgásiránya nem megfelelő, a következőképpen fordíthatja meg:
- Lépjen be a menübe, navigáljon a "Mount Setup" részbe. A beállítási lehetőségek több képernyőoldalon szerepelnek.
- Ezek között a jobbra-balra gombokkal lépkedve válassza a "Motor rotation" oldalt.
- Itt négy jelölőnégyzetet talál, amelyekkel megfordíthatja a motorok alapértelmezett forgásirányát és igény szerint felcserélheti a guiding korrekciók irányát is.
- Ellenőrizze a motorok áramerősségét. A Mount setup menüben lehetősége van az áramerősség állításáara motoronként külön-külön. Különböző áramerősségeket adhat meg nyugalmi állpothoz, követéshez és gyorsjárathoz.
Az MC3 belső programjának (Firmware) frissítése
Az MC3 vezérlőegység belső programja bármikor frissíthető, így lehetőség van arra hogy ön mindig a legfrissebb programmal használja az MC3-at. Az új programverziók vagy új funkciókkal gazdagítják az eszközt vagy valamilyen hibára adnak megoldást ezért általában érdemes frissíteni.
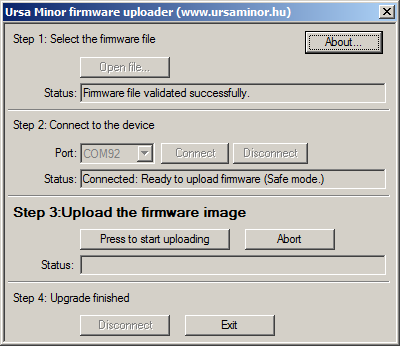
A frissítés az ursaminor_uploader programmal valósítható meg:
A programon kívül szüksége lesz az MC3 firmware-t tartalmazó filera is. Ennek letölthetőségét a downloads_hu.html oldalon találja meg.
A program használata egyszerű. A feltöltési folyamat négy lépésre osztható. Ez a négy lépés a program kezelőfelületén is jól elkülönül: Ennek megfelelően vízszintes vonalakkal van az ablak felosztva. A négy részterület közül az az aktív, amelynek felirata bold karakterekkel van szedve. A mellékelt képen épp a harmadik lépés az aktív.
Mielőtt elindítja a feltöltő programot, csatlakoztassa az MC3-at a számítógéphez és kapcsolja be azt. A szokásos módon keresse meg, hogy melyik COM portra osztotta be a számítógép az MC3-at. Ezután indíthatja a programot.
- Első lépés
- Ezzel kezdjük a munkát. Ebben a lépésben ki kell választanunk a feltöltendő firmware file-t. Nyomja meg az Open File gombot és a szokásos módon keresse meg a file-t, amit előzőleg az Internetről letöltött. A program ellenőrzi a file valódiságát. Hiba esetén nem enged továbblépni. Ha a file rendben van, a státusz sorban a "Firmware file validated successfully" üzenet jelenik meg, és továbblép a második fázisba.
- Második lépés
- Válassza ki a COM port számot, majd kapcsolódjon az MC3-hoz a Connect gomb megnyomásával. Néhány másodperc eltelik, amíg a program lekérdezi a csatlakoztatott MC3 verzióját. Ekkor vizsgálja meg a program azt is, hogy a kiválasztott firmware file kompatibilis-e a csatlakoztatott eszközzel. Összeférhetetlenség esetén (Pl. ha MC3 firmware-t próbálna rátölteni Ursa Minor kézivezérlőre vagy Panocont-ra) hibát ad és nem enged továbblépni a következő fázisra. Ha a firmware kompatibilis a csatlakoztatott eszközzel, továbblépünk a következő fázisra.
- Harmadik lépés
- Készen állunk a feltöltésre. Nyomja meg a "Press to start uploading" gombot, és a feltöltés elindul. A folyamat 1-2 percig is eltarthat, eközben a státusz sorban olvashatja, hol tart éppen.
- Negyedik lépés
- A feltöltés befejeződött, bontsa a kapcsolatot és zárja be a programot.
Az MC3-at kapcsolja ki, a következő bekapcsoláskor az új firmware fog működni.
Megjegyzés: Előfordulhat hogy szoftver hiba miatt, vagy egy korábbi félbeszakított upgrade miatt a feltöltőprogram nem tud csatlakozni az MC3-hoz. Ilyenkor indítsa el Safe módban az MC3-at és végezze el így a feltöltést:
- Kikapcsolt állapotban vegye le az MC3 dobozának fedelét, majd a panelon levő jumpert tegye zárt állásba. (A két tüskét zárja össze.)
- Kapcsolja be az MC3-at.
- Az MC3 feltöltés módban indul, ami onnan vehető észre hogy a két autoguider LED felváltva villog. Ebben az állapotban csak újraprogramozásra van lehetőség, normál használatra nem.
- Végezze el a firmware feltöltését a korábban tárgyalt módon.
- Feltöltés után kapcsolja ki az MC3-at és tegye vissza a jumpert "open" állapotba: Csak az egyik tüskén legyen a jumper, a másik maradjon szabadon.
- Az MC3 készen áll a használatra.
Használat Ursa Minor kézivezérlővel
Az MC3 a legkényelmesebb módon az Ursa Minor kézivezérlővel használható. Ez a kézivezérlő kimondottan az MC3-hoz lett kifejlesztve. Használatáról a következő oldalon olvashat.
Használat az Ursa Minor Pro programmal, kézivezérlő nélkül
Az Ursa Minor programmal történő használat külön oldalon részletesebben is le van írva.
Fix telepítésnél, kupolában levő távcső esetében nem mindig van szükségünk kézivezérlőre. Minden funkció elérhető az Ursa Minor Pro program felhasználói felületéről.
Ez az útmutató azt az esetet tárgyalja, amikor nem használunk kézivezérlőt. Az MC3-at közvetlenül a számítógépről, az Ursa Minor Pro programmal irányítjuk.
Időpont és földrajzi pozíció beállítása
A távcsővezérlés szempontjából alapvető fontosságú, hogy a program ismerje a pontos földrajzi koordinátánkat és a pontos időt. Ezek nélkül a pozicionálás nem lesz sikeres.
A beállítása a "Beállítások / Földrajzi pozíció" és a "Beállítások / Időpont" menüpontban van lehetőség.
Meridián flip (kelet-nyugat átfordítás) beállítása
Korábban volt szó arról hogy vezérlés szempontjából fontos hogy a távcső a mechanika keleti vagy nyugati oldalán van. Időnként átfordításra van szükség. Ezt az átfordítást az Ursa Minor programmal is elvégezhetjük.
Megjegyzés: A kereskedelemben kapható távcsővezérlések és csillagászati programok nagy töbsége nem alkalmas arra hogy a távcső átfordítását magából a planetárium programból végezzük el. Ilyen esetben arra kényszerülünk hogy a planetárium programban bontsuk a kapcsolatot, az átfordítás után pedig újra kapcsolódjunk és végezük el a kezdeti beállításokat (pl. a referenciacsillagra állást). Az Ursa Minor programot és MC3/MC4 vezérlőt használva nem kell a munkánkat ilyen módon megszakítani.
Az Ursa Minor Pro program automatikusan és manuálisan is lehetővé teszi a távcső átfordítását. A következő lehetőségek közül választhatunk:
- Manuális átfordítás
- Természetesen nem arról van szó hogy kézzel (a kuplungot lazítva) nekünk kellene átfordítani a távcsövet. A "manuális" szó azt jelenti, hogy gombnyomással, mi utasítjuk a programot arra hogy végezze el az átfordítást. Ebben az esetben a program önállóan a mi kérésünk nélkül nem végez átofrdítást. (Ez a javasolt módszer)
- Automatikus átfordítás (egyszerű)
- A program maga dönti el hogy objektumra pozicionálás előtt át kell-e fordítani a távcsövet. Az átfordítást végre is hajtja.
- Automatikus átfordítás (állítható)
- Ugyanaz mint az előző, de magunk megadhatjuk, mi legyen az a képzeletbeli vonal ami az égboltot virtuálisan kettéosztja keleti és nyugati térfélre.
Megjegyzés: A második két eset nem veszélytelen, mert a magától elinduló átfordítás során a távcsövön levő kiálló alkatrészek és a kábelek beleakadhatnak az állvány alkatrészeibe. Az átfordítást célszerű úgy végezni hogy eközben a távcső mellett állunk és folyamatosan figyeljük, nem akad-e be valami. Ha a három lehetőség közül az elsőt válasszuk, a program sosem fogja magától, kérdezés nélkül átfordítani a távcsövet. Ezt nekünk kell majd elindítani gombnyomással, ha szükségesnek találjuk.
Az automatikus átfordítási módok olyan obszervatóriumi távcsőmechanika esetében javasoltak, ahol a kábelezés végig rejtve halad és a mechanika fel van szerelve megfelelő végállás és ütközés gátló szenzorokkal.
A következő képen láthatjuk, hogyan állíthatjuk be ezt a programban:

- Indítsa el az Ursa Minor programot és lépjen be a "Távcső / Mechanika kelet-nyugat átfordítása" menübe.
- A képen látható ablak jelenik meg, ahol válassza a három közül az első módot. Ehhez a művelethez még nem kell a távcsővezérlőhöz csatlakozni.
Ezt a beállítást elég csak egyszer, a program használatba vételekor elvégezni. Ráadásul a manuális mód az alapértelmezett mód, tehát még változtatni sem kell a beállításon.
Kapcsolódás az MC3-hoz
Ezután minden készen áll hogy a távcsövet a programmal vezérelje. A lépések a következők:
- Csatlakoztassa az MC3-at a számítógéphez USB kábbellel. Kapcsolja be az MC3-at, majd indítsa el az Ursa Minor Pro programot.
- Győződjön meg róla hogy az Ursa Minor programban beállított földrajzi koordináták, időzóna, téli/nyári időszámítás és időpont megfelelő-e. Ha szükséges, állítsa be a megfelelő adatokat.
- Válassza ki a Távcső / Távcső vezérlése menüpontot.
- Megnyílik a távcsővezérlő ablak. Ez az ablak folyamatosan meg lehet nyitva, a távcső használata közben a program fő
ablakára (amiben a csillagtérkép látható) bármikor visszaléphet a távcsővezérlés zavarása nélkül.
- Válassza a távcsővezérlés ablak bal felső sarkában levő "Kapcsolódás" gombot. A megjelenő ablakban válassza ki a távcsővezérlő típusát: Ursa Minor MC3/MC4 direct. Ugyanitt válassza ki a Com port számot is, majd nyomja meg a kapcsolódás gombot.
- A távcsővezérlő ablakban az állapotmezőben megjelenik a "Kapcsolódás folyamatban", majd a "Készenlét" üzenet.
- A nyíl gombokkal mozgathatja a távcsőmechanikát. A mozgást a Stop gombbal állíthatja meg.
- A távcsővezérlő ablak alsó szélén a szövegmezőben láthatja hogy a program szerint a távcső a mechanika keleti vagy
nyugati oldalán van. A program induláskor azt feltételezi hogy a távcső keleti oldalon van, és az egyenlítő felé néz.
Az ajánlott kezdőállapot a képen bemutatott keleti pozíció: Az ellensúly tengelye vízszintes legyen és nyugatra nézzen. A távcső az állvány keleti oldalán legyen, objektívje az égi egyenlítő felé nézzen.Ha a távcső helyzete ennek megfelelő, ugordja át a következő pontot.
- Ha a távcsöve nem a keleti oldalon áll, két dolgot tehet:
- Átfordítja oda (akár kézzel, akár a motorokkal) és közli a programmal hogy most már keleti oldalon van a távcső.
- Hagyja a távcsövet a nyugati oldalon, és ezt közli a programmal.
- Kapcsolja be a követést a "követés" gomb megnyomásával. A gomb "beragad". Ismételt megnyomásával a követés leállítható.

Referenciacsillagra állás
A program ekkor még nem képes pozicionálásra. Azt már tudja hogy a távcső melyik térfélen van (Az állvány melyik oldalán van), de azon belül a pozíciója nem ismert.
A távcsövet manuálisan rá kell irányítanunk egy általunk ismert csillagra, majd tudatnunk kell a programmal hogy most ez a távcső aktuális pozíciója (referenciapont). A referenciapont lehet bármelyik csillag ami az aktuális térfélen van (tehát nem igényli a távcső átfordítását az állvány másik oldalára).
A lépések a következők:
- Keressen egy kellően fényes és ismert csillagot erre a célra az égbolton.
- Vezesse a távcsövet a kiválasztott csillagra az iránygombok segítségével.
Megjegyzés: Ez a művelet sajnos meglehetősen kényelmetlen: A szemünkkel az okulárba kell néznünk, ugyanakkor a távcső mozgását a számítógép képernyőjén, egérrel kattintással végeznünk. Ez a művelet más planetárium programokkal sem lenne könnyebb.
Az Ursa Minor Pro program viszont kínál egy kényelmes megoldást: A távcső mozgatását Gamepad-del (Játékvezérlővel) is végezhetjük. A gamepad-et kézben tartva, szemünkkel folyamatosan az okulárba nézve könnyen ráállíthatjuk a távcsövet a kívánt célpontra.

- Keresse meg ugyanezt a csillagot a képernyőn megjelenített csillagtérképen is.
- A csillagon kattintson a jobb ebérgombbal, majd a felugró menüben válassza az "1. referneciapont, a távcső most ide
mutat" menüpontot.
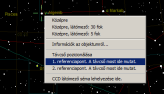
Megjegyzés: A menüben van egy másik menüpont is, a második referenciapont megadására. Ezt a lehetőséget csak Azimutális mechanikáknál használja a program. Ezt az opciót ne válasszuk ekvatoriális mechanika esetében.
- A program ezután alkalmas a pozicionálásra. Arra vigyázzon, hogy olyan égi célpontokat válasszon, ami nem igényli a távcső átfordítását a másik oldalra.
- Ha a kívánt célpont a másik oldalon van, akkor a távcsövet át kell fordítani. Ezt a műveletet fokozott elővigyázatossággal végezzük! Ügyeljünk rá, hogy a távcsőről lógó vezetékek nehogy a mechanika kiálló részeibe akadjanak.
- A távcső átfordítását ne kézzel végezzük, hanem a programból idítva. Erre szolgálnak a távcsővezérlő ablak alsó szélén levő "Flip to East" és "Flip to West" gombok.


Parkoltatás
Az Ursa Minor Pro program a kapcsolódás után minden esetben azt feltételezi, hogy a távcső a park pozícióban van.
Hogy ez mindig így legyen, ne felejtsük el a munka befejeztekor a kapcsolat bontása előtt a távcsövet park pozícióba küldeni. Ehhez nyomja meg a távcsővezérlés ablakban a "Goto Park" gombot! Ha a távcső az oszlop ellenkező oldalán áll, a program a meridian flip-et automatikusan elvégzi.
Fontos: Parkoltatás előtt kapcsoljuk ki a követést!
Használat más planetárium programmal
Az MC5/MC3 vezérlésekhez saját ascom driver lett kifejlesztve. Ennek köszönhetően a legtöbb planetáriuprogrammal képes együttműködni. Régebbi MC3 verziók még a Meade LX200 protokolt használták és nem saját fejlesztésű ascom driverrel működtek. A parkolás, Meridián flip és enkóderek kezelése a saját ascom driver fejlesztésével vált elérhetővé. A régi modelleken firmware frissítés után használható lesz a saját ascom driver.
A saját ascom driver használatához a következő (vagy frissebb) firmware verziókra kell frissíteni: A legfrisseb firmware-eket a béta kiadások oldalán találja.
- MC3 alapkészülék: Legalább 99.00.00.11 verzió.
- Kézivezérlő: Legalább 99.00.00.11 verzió.
A számítógépes kapcolathoz nem elegendő az alapkészülék, a kézivezérlőre is szükség van. A valós idejű óra (amely kikapcsolt állapotban is jár) a kézivezérlőben található. Erre szükség van ahhoz, hogy az MC3-at Meade LX200 parancsokkal vezéreljük.
Az MC5 rendelkezik gombelemmel táplált órával, így ebben az esetben kézivezérlő nélkül is lehetséges a számítógépről vezérlés ascom driverrel.
A legtöbb planetáriumprogram ASCOM kompatibilis. A lépések a következők:
- Csatlakoztassa a kézivezérlőt az MC3-hoz!
- Csatlakoztassa az MC3-at egy USB kábellel a számítógéphez! (A kézivezérlő USB csatlakozója maradjon üresen!)
- Kapcsolja be az MC3-at! Bekapcsolás után az MC3 úgy tekinti, hogy a távcső park pozícióban van.
- Ellenőrizze a földrajzi pozíciót és a pontos időt a kézivezérlő menüjében. Korrigáljon, ha szükséges.
- Végezze el a távcső referenciacsillagra történő szinkronizálást. (Ezt a planetárium programból is megteheti, ha az lehetőséget biztosít erre.)
- Indítsa el a planetárium programot a PC-n.
- A planetárium programban használja a távcső kapcsolódás funkciót, és ott válassza ki a "Ursa Minor Telescope Ascom Driver"-t!
- Amint a planetárium program kapcsolódott az MC3-hoz, a rendszer használatra kész.
A kikapcsolási folyamat a következőképpen néz ki:
- Bontsa a kapcsolatot a planetárium programmal.
- Parkoltassa le a távcsövet az MC3 kézivezérlőjével.
- Kapcsolja ki az MC3-at
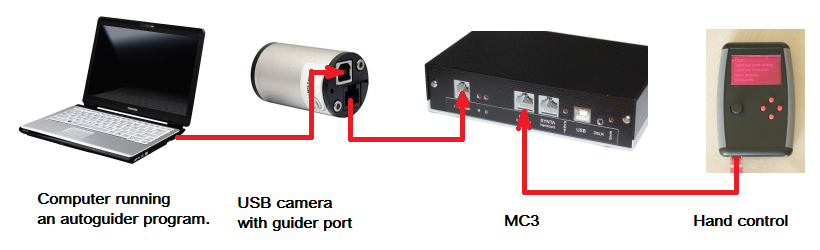
Auto guiding számítógéppel, guide portos kamerával
A példában nem használunk planetárium programot. A goto pozicionálást a kézivezérlőre bízzuk. A vezetést olyan kamerával végezzük amelynek beépített guider portja van. Ezen keresztül csatlakoztatjuk az MC3-hoz, ezen a kábelen keresztül jutnak el a guiding jelek az MC3-hoz.
Az MC3 ebben az esetben közvetlenül nincs a számítógéphez csatlakoztatva. A számítógépen futó program nem tud az MC3-ról. A guiding jelek a kamerából közvetlenül az MC3-hoz jutnak el, a számítógép kikerülésével.
Autoguider program kiválasztására többféle lehetőségünk van,egyik lehetséges mód a PHD Guider program használata.
Auto guiding számítógéppel, ascom driver közbeiktatásával
Ha a guiding kamera nem rendelkezik autoguider kimenettel, a kamerát nem tudjuk ilyen módon az MC5-höz, MC3-hoz csatlakoztatni.
A PC-n futó autoguider program jeleit az ascom driveren keresztül juttatjuk el az távcsővezérlőhöz. Az általunk választott autoguider programban válasszuk ki azt az opciót, hogy ascom driverrel vezéreljük a mechanikát, és a telepített ascom driverek közül válasszuk az Ursa Minor Telescope Ascom Driver -t. Csatlakozás után a guiding jeleket az ascom driver továbbítja az MC3-hoz az USB porton keresztül.